By Andrea Myers, M.S. Graduate Student, and Dr. Renee Threlfall, Research Scientist, University of Arkansas System Division of Agriculture Food Science Department
Introduction
Fresh-market blackberries (Rubus L. subgenus Rubus Watson), known for health promoting benefits, are hand-picked to maintain quality from harvest to consumption. As value and demand grows for fresh-market blackberries, harvest labor shortages and costs hamper potential industry expansion and supply. While conventional mechanical harvesting of blackberries decreases labor costs and time to harvest the delicate nature of blackberry fruit, coupled with dense plant canopy, has prohibited mechanical harvesting for fresh-market blackberries.
Robotic harvesting has the potential to impact the fresh-market blackberry industry. A research project was initiated at the University of Arkansas System (UA System) Division of Agriculture by Drs. Renee Threlfall and Yue Chen to investigate the feasibility of a robotic harvester of fresh-market blackberries and their marketability. This project is supported by the University of Arkansas Chancellor’s Innovation and Collaboration Fund Grant and from the Arkansas Department of Agriculture’s Specialty Crop Block Grant Program. Andrea Myers and Anthony Gunderman, graduate students, worked on the development of a soft-robotic gripper as part of their research.
Measuring force
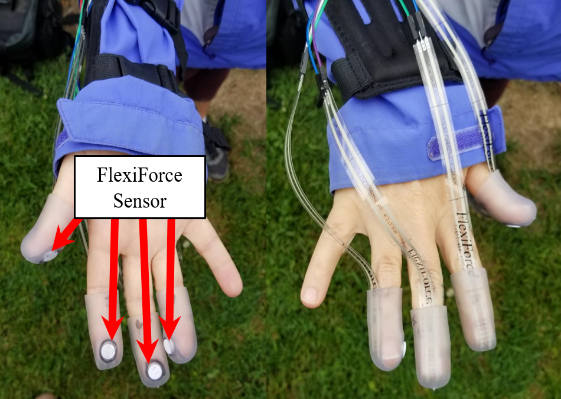
The first step in developing the robotic harvester was determining a method to measure force. Ultimately, the apparatus used was designed with resistive force sensors placed beneath silicone finger covers positioned on the thumb, index, middle, and ring fingers of the right hand. Sensors were located on the fingers to maximize contact with the berry surface during harvesting. (Fig.1). Voltage data was measured with a single power source, non-inverting op-amp circuit. Voltage measurements were sent through Bluetooth and then converted to force values. Data recording and processing were conducted in a portable, water-resistant cause housed in a backpack (Fig. 2).

Blackberry harvest
The blackberries were grown at a commercial farm in Fayetteville, AR and harvested at peak ripeness in June-July 2020. Four cultivars (Natchez, Osage, Prime-Ark®Traveler, and Sweet-Ark™ Caddo) were harvested. The blackberries were harvested by hand using the custom-made force sensing apparatus (Fig. 3) and then transported to the UA System Food Science Department in Fayetteville for analysis.

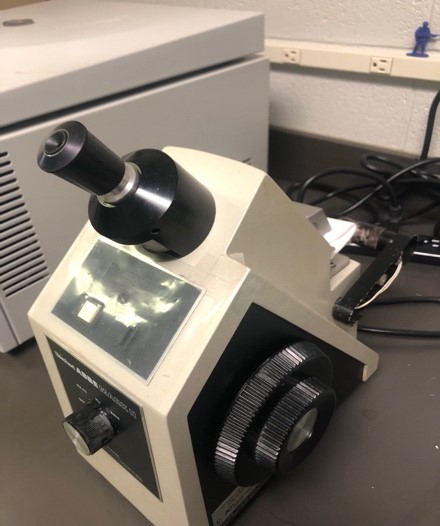
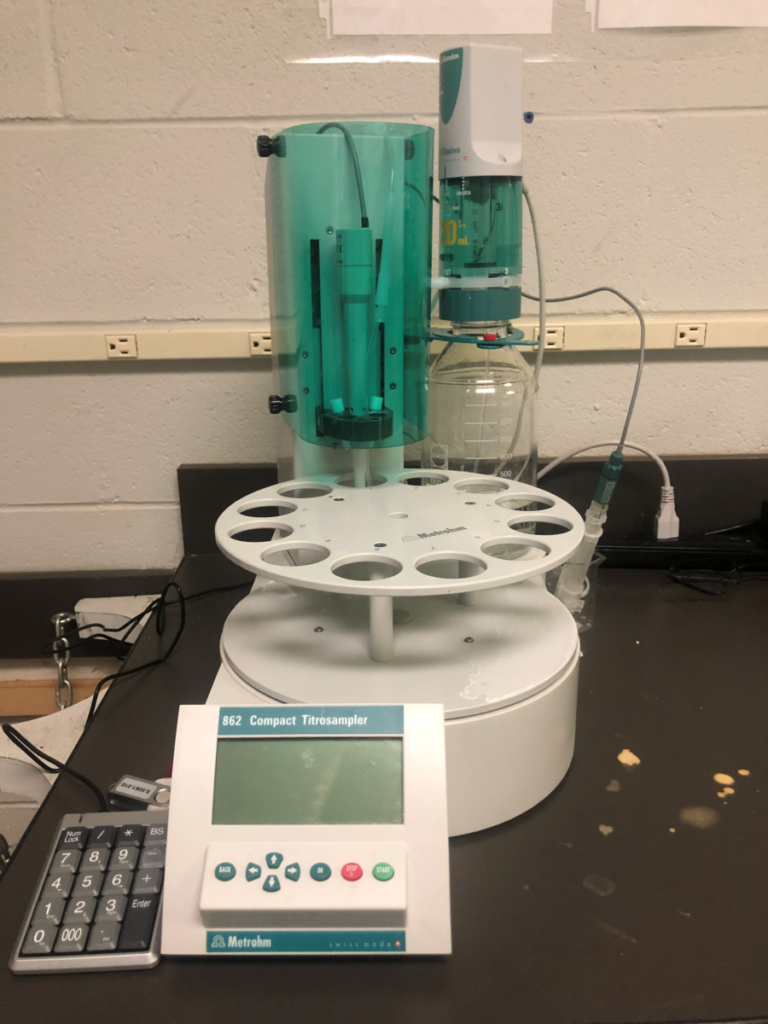
Berry analysis-physical and composition
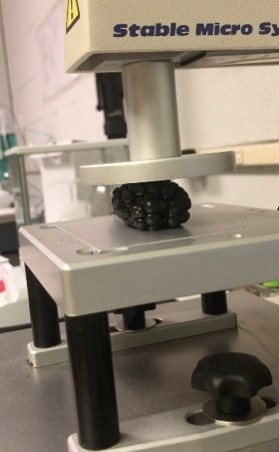
The blackberries physical (weight, length, width, and firmness) attributes were analyzed at harvest (Fig. 4). Five berries from each clamshell were analyzed (Fig. 5). The berries were frozen and then thawed at room temperature and squeezed through cheesecloth to extract juice for composition (soluble solids, pH, and titratable acidity) analysis (Fig. 6). At harvest Sweet-Ark™ Caddo was the largest berry in terms of weight (8.10 g), length (29.06 mm), and was the firmest blackberry (8.79 N). Osage was the smallest berry in weight (3.76 g), width (19.05 mm) and was the softest berry (6.27 N). Soluble solids ranged from 12.47 -11.63%, Natchez and Sweet-Ark™ respectively. Osage had the highest pH (3.39) and Natchez had the lowest (3.07). Natchez had the highest titratable acidity (1.40%) and Prime-Ark® Traveler had the lowest (1.07%).


Berry analysis-marketability
The marketability attributes (weight loss, leakage, decay, and red drupelet reversion) were evaluated at harvest and at 21 days post-harvest (Fig. 7). Cultivar did not impact any marketability attributes after 21 d of storage at 2 °C. Leakage was less than 10%, decay was less than 2%, and red drupelet reversion was less than 9% for these cultivars. The average leakage was 6%, decay was 0.4% and red drupelet was 5% across all cultivars.



Force analysis
The force measured on the thumb and fingers was different for each cultivar of blackberries (Table 1). ‘Sweet-Ark™ Caddo’ (1.18 N) had the highest force on the thumb, and ‘Prime-Ark® Traveler’ (0.51 N) had the lowest. For the index and middle fingers, ‘Natchez’ had the highest force (0.27 N and 0.49, respectively) and ‘Osage’ had the lowest (0.09 N and 0.31 N, respectively). In addition, ‘Sweet-Ark™ Caddo’ also had the lowest force on the middle finger (0.31 N). For the ring finger, ‘Sweet-Ark™ Caddo’ (0.15 N) had the highest force, and ‘Prime-Ark® Traveler’ (0.01 N) had the lowest. Generally, the size of the berry was related to the force needed to harvest. ‘Caddo’, the largest berry, had the greatest force needed to harvest, whereas ‘Prime-Ark® Traveler’, the smallest berry, had the least force needed to harvest.
| Cultivar | Thumb | Index | Middle | Ring |
| Natchez | 0.75 | 0.27 | 0.49 | 0.05 |
| Osage | 0.65 | 0.09 | 0.31 | 0.03 |
| Prime-Ark® Traveler | 0.51 | 0.10 | 0.37 | 0.01 |
| Sweet-Ark™ Caddo | 1.18 | 0.17 | 0.31 | 0.15 |
| Average of cultivars | 0.77 | 0.16 | 0.37 | 0.06 |
Regardless of cultivar, the thumb applied the highest average force (0.77 N), followed by middle finger (0.37 N), index finger (0.16 N), and ring finger (0.06 N). The thumb and middle finger were the primary force applicators while the index and ring fingers stabilized the berry. In terms of providing guidance to develop a robotic soft gripper, the underutilization of the ring finger (4% of total applied force) in the harvest of blackberries illustrated only three fingers are needed for a robotic design.
This force-sensing apparatus for harvesting fresh-market blackberries provided foundational data on harvesting force parameters essential in the design of a robotic gripper prototype. This project is only the first step to develop a soft robotic gripper for commercial use in harvesting fresh-market blackberries.